A model predictive control approach for trajectory tracking of quadrotors
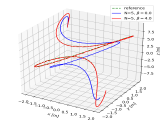
Our paper presents a model predictive control (MPC) approach for trajectory tracking of quadrotors, where a mathematical model of the quadrotor is developed with consideration of aerodynamic moment and drag to improve the simulation’s real-world accuracy.